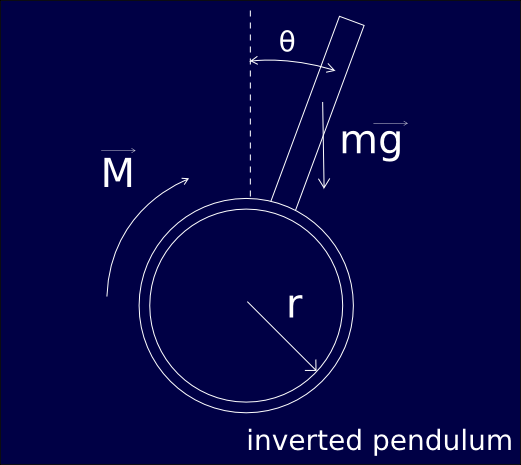
Робот балансир - типичная реализация задачи о перевернутом маятнике.
2013-09-27 00:00:00 | Tags : DIY электроника робот robot математика
После долгих часов настройки PID регулятора я добился следующего результата:
Однако, крутящий момент используемых моторов недостаточен. Можно наблюдать длительное движение в одну сторону-моторам не хватает мощности, вывести робота в нужное положение.
Tags: DIY электроника робот robot | 2013-09-27 20:14:40
Наконец я завершил постройку робота балансира. Для него была рассчитана математическая модель и линейно-квадратичный регулятор.
Вот, что получилось, оно даже может управляться с телефона:
Tags: robot rc diy math | 2014-04-26 15:11:16