Давно я не писал в свой блог. Пора бы поделиться новостями.
Была разработана математическая модель квадрокоптера. Теперь я занимаюсь ее проверкой. Модель проверить не сложно, сложно получить данные с реального аппарата.
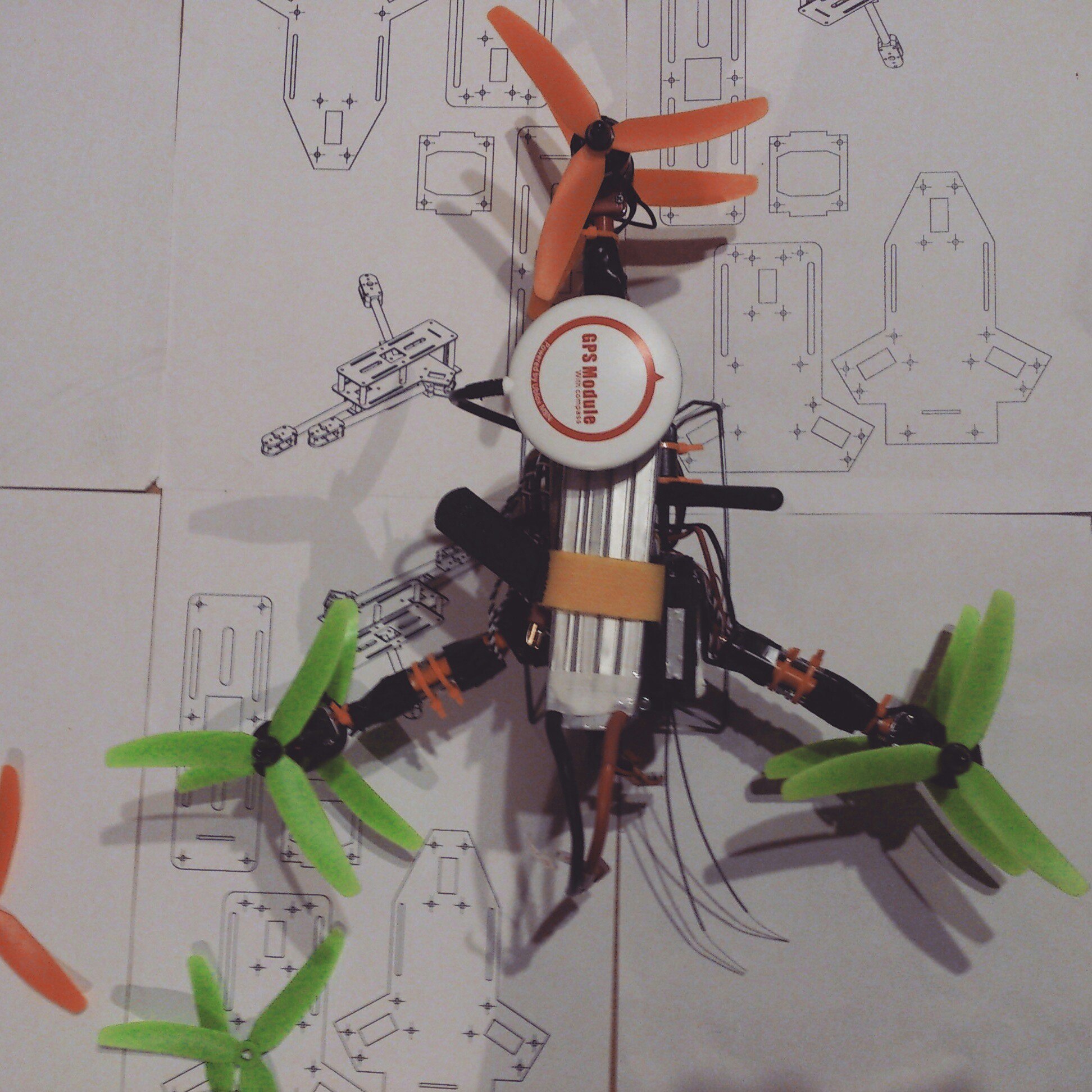
Для проверки математической модели я закрепил коптер так, что он мог вращаться только по одной оси.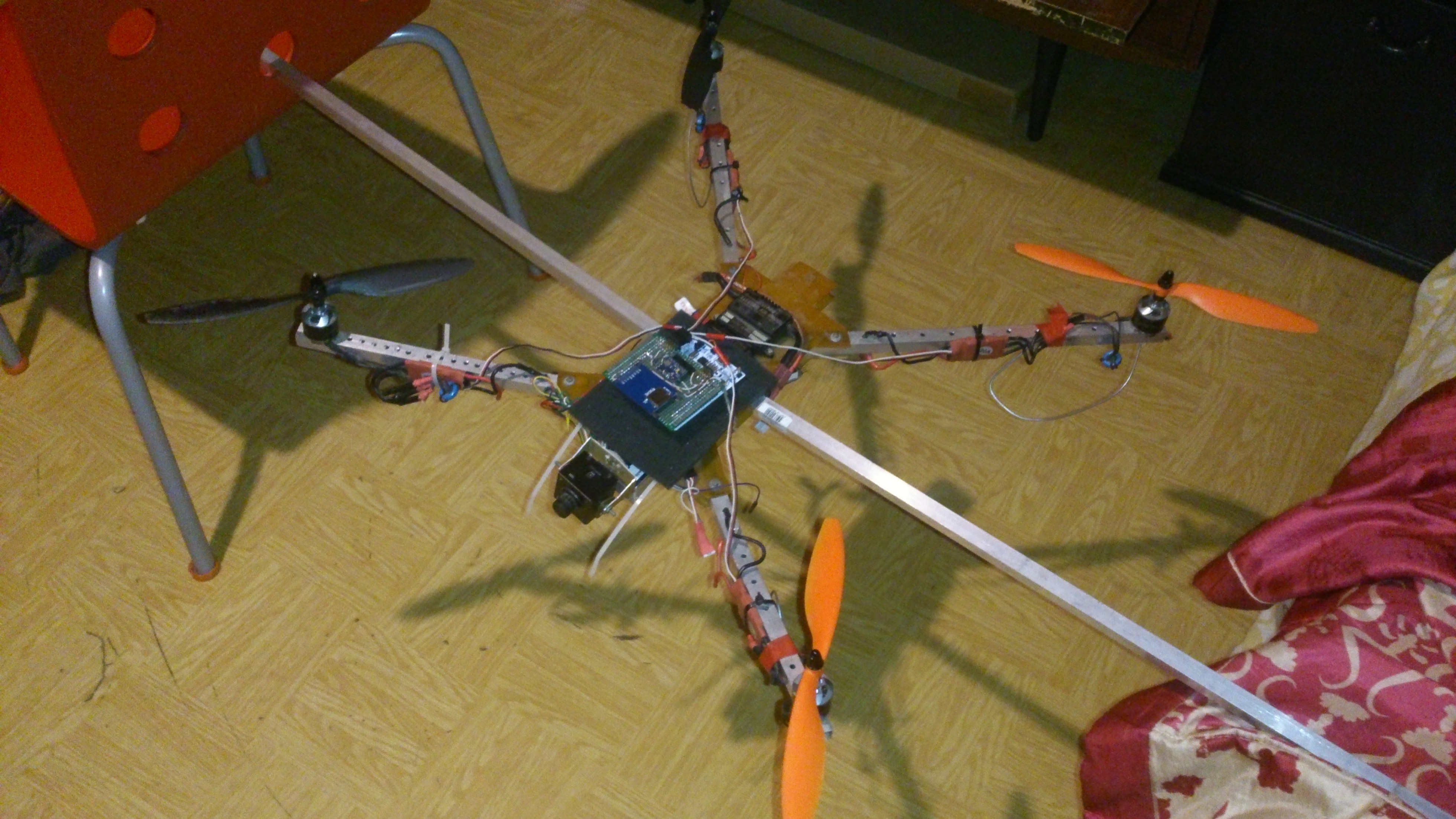
В качестве управляющего воздействия подал 2 ступеньки. После этого, снятые данные и модель прогнал через Matlab Parameter Estimation Toolbox и получил следующее(Оранжевый график - модель, синий - реальные данные):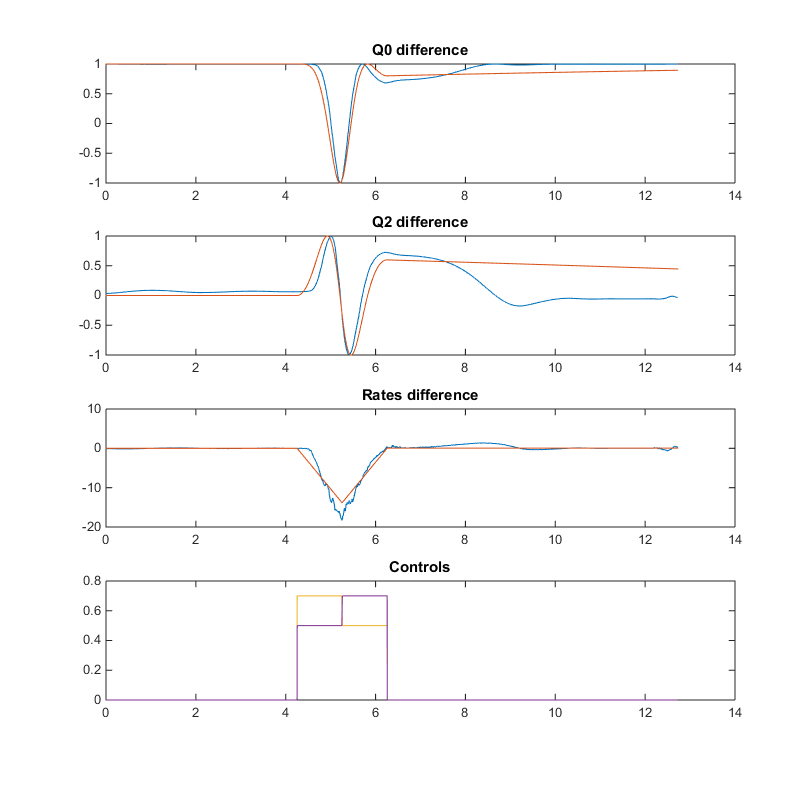
К сожалению, можно заметить, что модель опережает реальные данные. Похоже, что это происходит из-за нелинейности мотоустановки.
Первое, на что я подумал, была зависимость частоты вращения мотора от ШИМ сигнала. Была построена простая установка для подсчета частоты вращения.
Как видно из графика, зависимость оказалось линеной, однако это не означает, что линейна зависимость тяги от команды, поступающей на регулятор.
Для снятия данных о тяге был заказан тензорометрический датчик, которого я и жду.
Tags: автопилот математика ТАУ квадрокоптер | 2015-06-05 21:32:27
Наконец я завершил постройку робота балансира. Для него была рассчитана математическая модель и линейно-квадратичный регулятор.
Вот, что получилось, оно даже может управляться с телефона:
Tags: robot rc diy math | 2014-04-26 15:11:16
Будьте аккуратны при покупке китайских регуляторов.

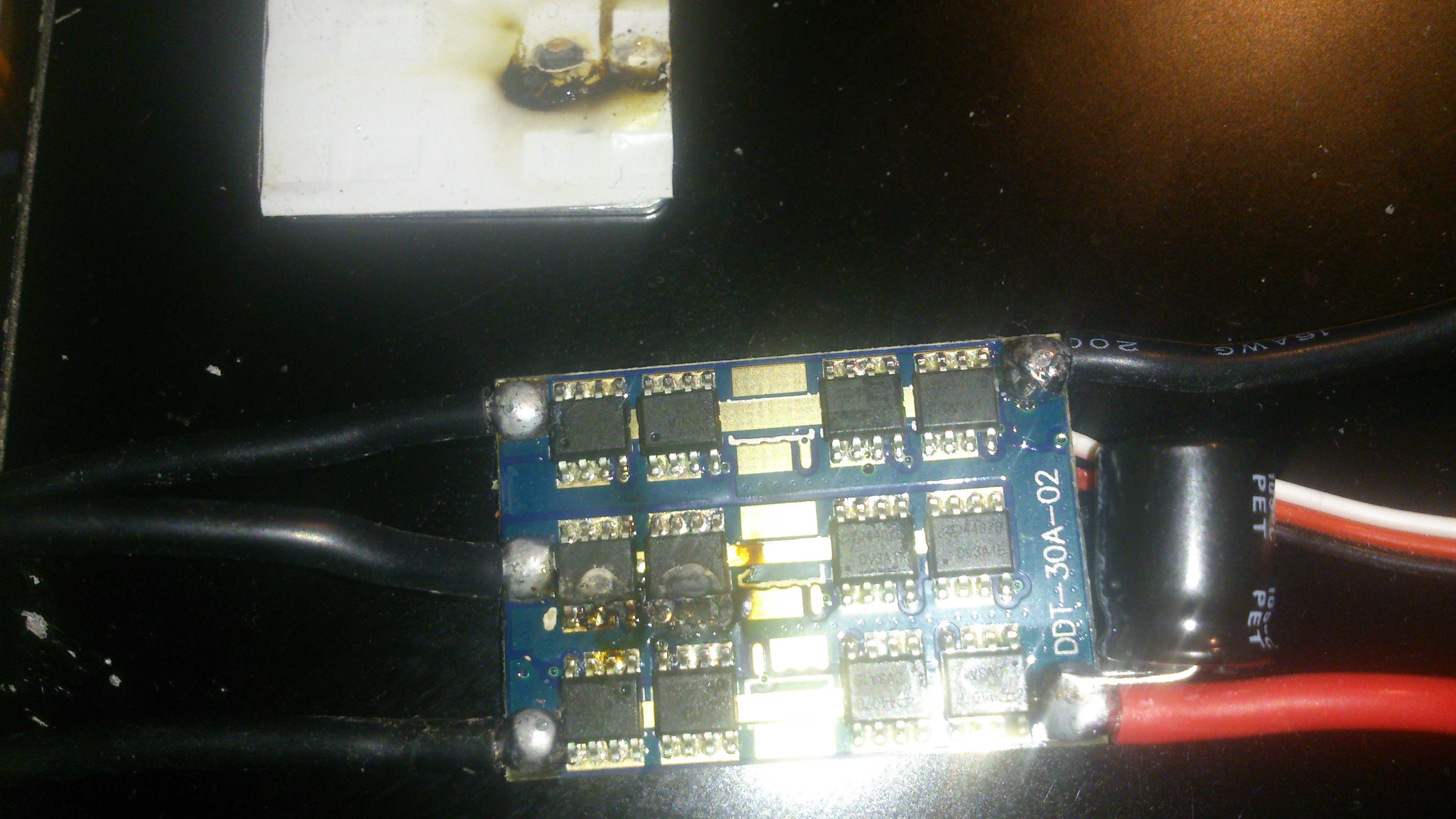
Tags: fpv брак неудача | 2014-03-10 13:29:31
Полетал над авиамодельным аэродромом в Ульянково. Был сильный ветер.
Tags: fpv diy copter air rc | 2013-10-15 18:55:22
Полетал в музее паровозов в Переславле-Залесском. К сожалению из-за ошибки камеры половина видео была затерта.
Tags: fpv diy copter air rc | 2013-10-11 22:47:33
После долгих часов настройки PID регулятора я добился следующего результата:
Однако, крутящий момент используемых моторов недостаточен. Можно наблюдать длительное движение в одну сторону-моторам не хватает мощности, вывести робота в нужное положение.
Tags: DIY электроника робот robot | 2013-09-27 20:14:40
Полет над полем рядом с музеем-усадьбой Абрамцево
Tags: fpv diy copter air rc quad | 2013-09-01 09:32:45
Наконец полетал нормально по камере:
Tags: fpv quad copter air rc | 2013-08-16 18:17:17