


Двух-канальный лабораторный блок питания, выполненый на LM338
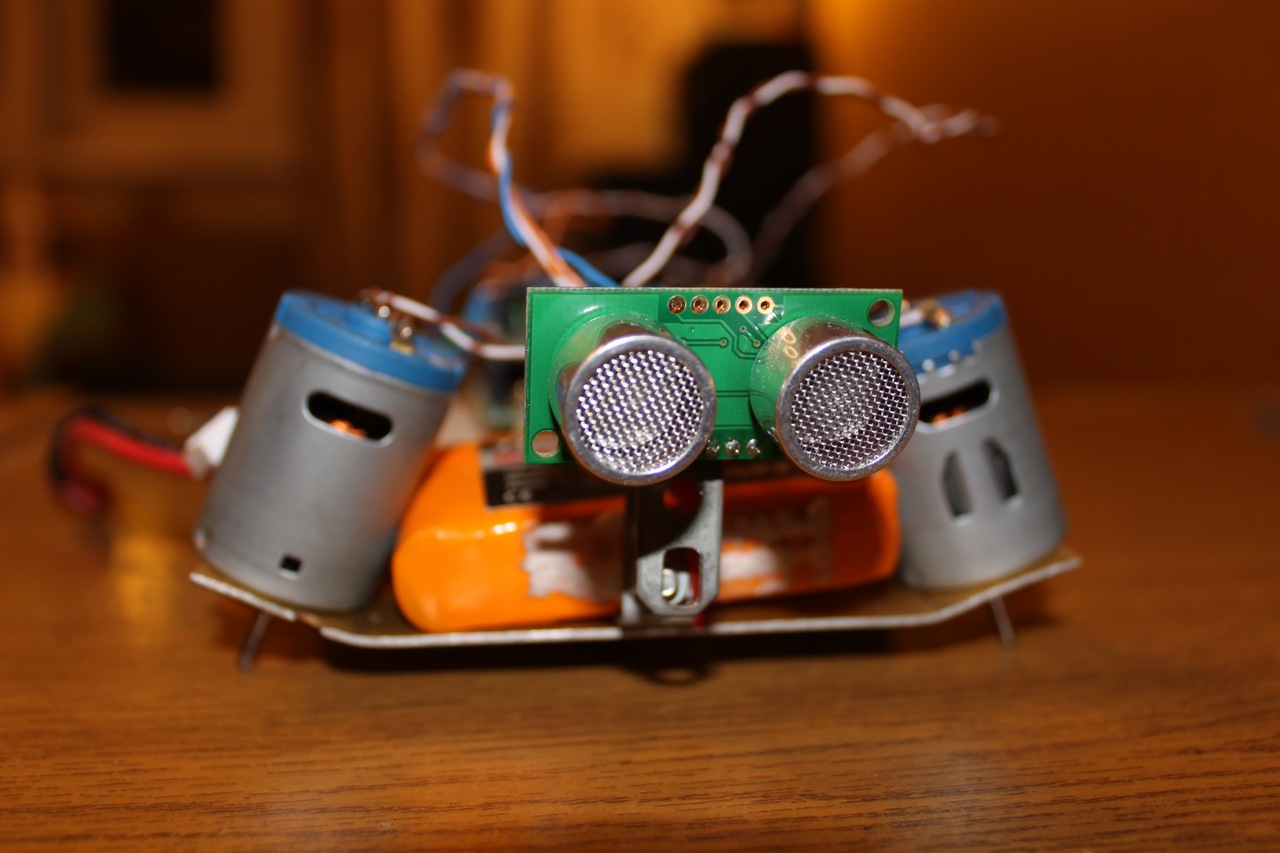
Робот черепашка.
Сенсоры: ультразвуковой дальномер
Управление: Arduino+L293D
Механика: 2 коллекторных мотора
Питание: 12В

Носители:
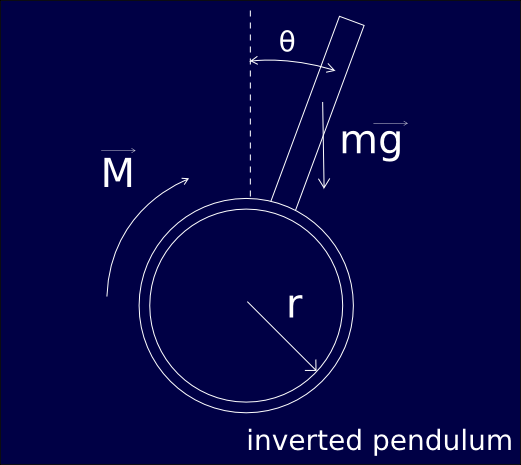
Робот балансир - типичная реализация задачи о перевернутом маятнике.

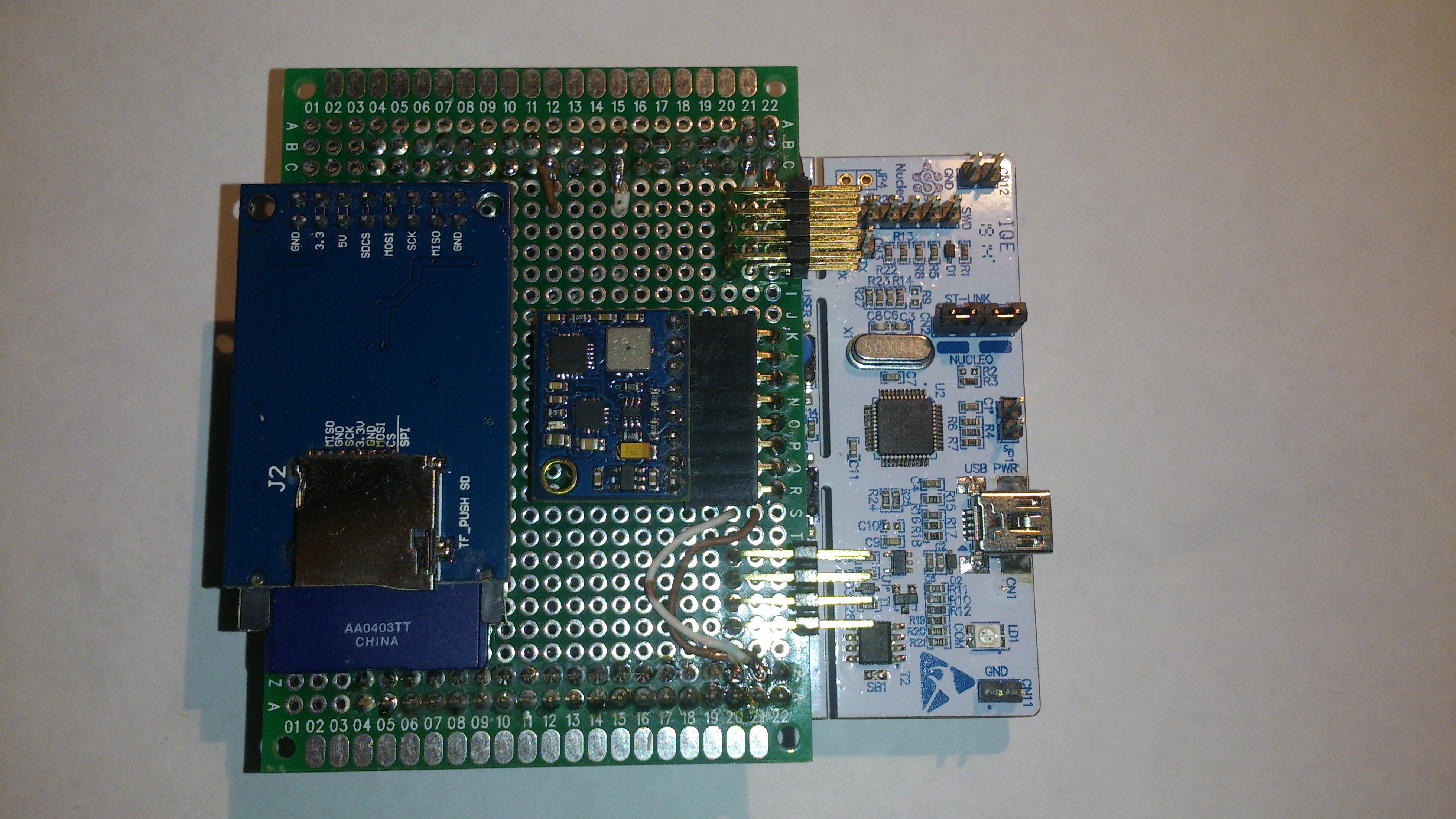
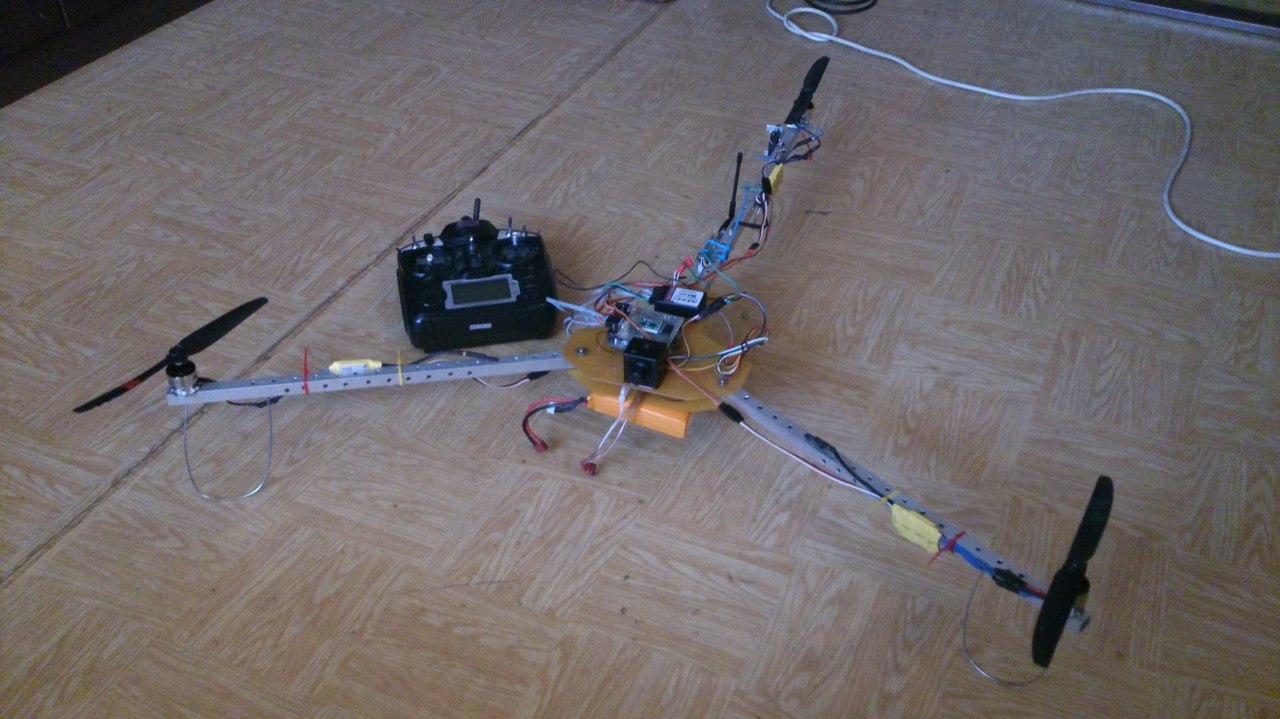
Проект по созданию собственной платы автопилота с новым видом регулятора.
